几何直觉
这一部分很简单,提到的主要是如下的一点内容:
- 两点之间线段最短;
- 路径长度可以通过无限细分求得,最短长度来自于两点间线段;
- 引入笛卡尔坐标系.
欧氏平面模型
定义: 欧氏距离空间
是如下所有点的全体:
并赋予如下的欧氏度量:
这里的度量是什么意思?在拓扑当中我们称空间 上的一个二元实函数(或更严格地来说应称泛函):
为度量,如果满足度量公理:
定义:度量空间 (metric space)
定义有序对 为度量空间,其中 为集合, 为满足条件的二元函数:
- 是一个非负有限实值二元函数;
- ;
- (对称性, symmetry) ;
- (三角不等式, triangle inequality) .
称为该度量空间当中的度量 (metric),若 不满足上述的 2 ,则称为伪度量 (pseudometric).
的欧氏距离显然满足如上公理,其中三角不等式使用 Cauchy-Schwarz 不等式即可.
参数化曲线 (parametrized path)
参数方程
定义:参数化曲线
一个 中的参数曲线或路径 (path) 是如下的一个连续映射:
其中 和 都是连续映射, 为曲线的参数.
将曲线参数化实际上就是把曲线看作一个点从 到 秒的运动路径,我们认定 为运动时间,将一个二维问题转变为一维问题而已.
参数曲线的分割与长度

我们已经知道两点之间距离的计算方法,对于任意的参数曲线,利用极限的语言就能说明其长度.
定义:参数曲线的长度
参数曲线 的长度定义为如下的上确界:
通过这个定义,我们可以证明我们刚才所说的几何直觉,利用三角不等式即可证明两点之间线段最短.
可校正曲线 (rectifiable)
定义:可校正曲线 (rectifiable)
参数化曲线 如果具有有限的长度 . 则称其为可校正曲线.
这个概念比较简单,证明某个曲线是可校正曲线只需使用到一些分析知识即可.
直线的描述
欧氏平面描述直线只需使用
当
则称两个直线是平行的.
上的等距同构 (Isometry) 与对称
等距同构 (Isometry)
定义:等距同构
映射 称为 上的等距同构,如果它保持欧氏距离,换言之即为对任意 ,都有
记这些映射的全体为 .
这是我们接下来要研究的主要对象,需要注意的是,等距同构的复合运算仍得到等距同构,此时可证明 是一个同构群.
等距同构一定是满射吗?
对于一些度量空间,等距同构可能不是满射,例如 . 但是如果这些空间中球面是紧集,则等距同构一定是满射.
上的仿射 (Affine) 结构
平移
定义:变换坐标平面
用 表示以 为坐标原点的所有实数向量集合:
这个变换可以理解为将坐标原点平移到 ,从而以 为原点重建坐标.
定义:平移变换
给定实数对 可定义平移变换为如下的映射:
这个映射可以验证其为等距同构. 这个想法是很自然的,因为距离显然不变,然后平移变换的逆变换也符合直觉:
欧氏仿射平面 (Euclidean affine plane)
定义:欧氏仿射平面 (Euclidean affine plane)
定义如下映射:
称 为欧氏仿射平面.
我们可以看到,实际上欧氏仿射平面就是考虑 在固定的平移 的仿射变换下的一一对应关系.
其中的向量就和我们在高等代数中学的线性空间一样,具有线性空间里面加法、数乘的性质,在此不赘述.
教材上说一大堆实际上就是在说明其符合线性空间的诸多性质.
的等距自同构
用同构诱导线性映射
设 ,不失一般性,可以认为 ,也就是说将零点映射为零点. 如果不是,直接全平面作平移即可,不影响同构.
等距同构诱导线性映射
利用 诱导线性映射为:
这个映射是线性映射是比较显然的,直接利用平行四边形法则即可.
用基来描述线性映射
这里在高等代数中就已经学过,在此还是再简单复习一下,我们如果在欧氏平面上使用 以及 作为基 ,那么对于任意的向量,根据平面向量基本定理可知
这里称 为 在 下的坐标,显然对于相同的向量,不同的基有不同的坐标.
那么,从高代的角度出发,基变换可以用矩阵来表示,我们只要从两个基之间的变换开始,假如 基线性变换到 :
那么有
新坐标下 应该表示为什么?我们自然想到
从线性方程组
解出系数即可. 这也就是说所谓的基变换也就是对原来的向量作线性变换而已.
现在我们来说明基变换的矩阵表示. 一个非常简单的例子就是单位矩阵:
它表示从标准正交基转为标准正交基. 如果考虑下面的例子:
它表示一个在标准正交基下坐标为 的向量在基 下坐标为 . 这就说明
在几何的观点来看,就是在标准正交基下坐标为 的向量在 的列向量作为基的时候坐标为 . (如果 不满秩,则会出现无解或者无穷解的情况,这分别对应了超出基的子空间、和两个基向量共线性的情形)
然后 也可视为一种线性变换,将 线性变换到 ,因此矩阵和线性变换也是一一对应的.
- 如果线性变换没有“降维”,换言之 满秩,则 可逆,从而线性变换也有其逆变换.
这个说法实际上有意思的点在于这很符合我们的几何直观,如果我们选线性变换为
即只取坐标轴投影,那么所有具有相同横坐标的向量都会有相同的变换结果,自然没有逆变换.
这是一种“降维打击”,这相当于把二维降到一维,所有降维的线性变换都是不可逆的.
正交群和特殊正交群
定义:正交群
如下集合关于矩阵乘法构成正交群:
这个群对应的线性变换也叫正交变换,它们是固定原点的线性变换,换言之不能是平移或者滑移 (glide) . 但是可以是伸缩或者旋转.
在这里我们不验证群公理,很简单不多说,但是我们可以发现,对于上面的正交群,可以从行列式上限制出一个子群,也就是限制行列式为 .
定义:特殊正交群
如下集合关于矩阵乘法构成正交群:
特殊正交群又在线性变换层面上把伸缩给去掉了,相当于只剩下了旋转. 在 维的 Euclid 空间当中,也有类似的 和 .
正交和反射
反射
反射在几何上就相当于把一个点根据一个轴对称到另一个点上,尽管反射是一个看似很简单的变换,但是组合起来实际上可以实现所有的等距同构(见作业). 这里给出一个直观的说明.
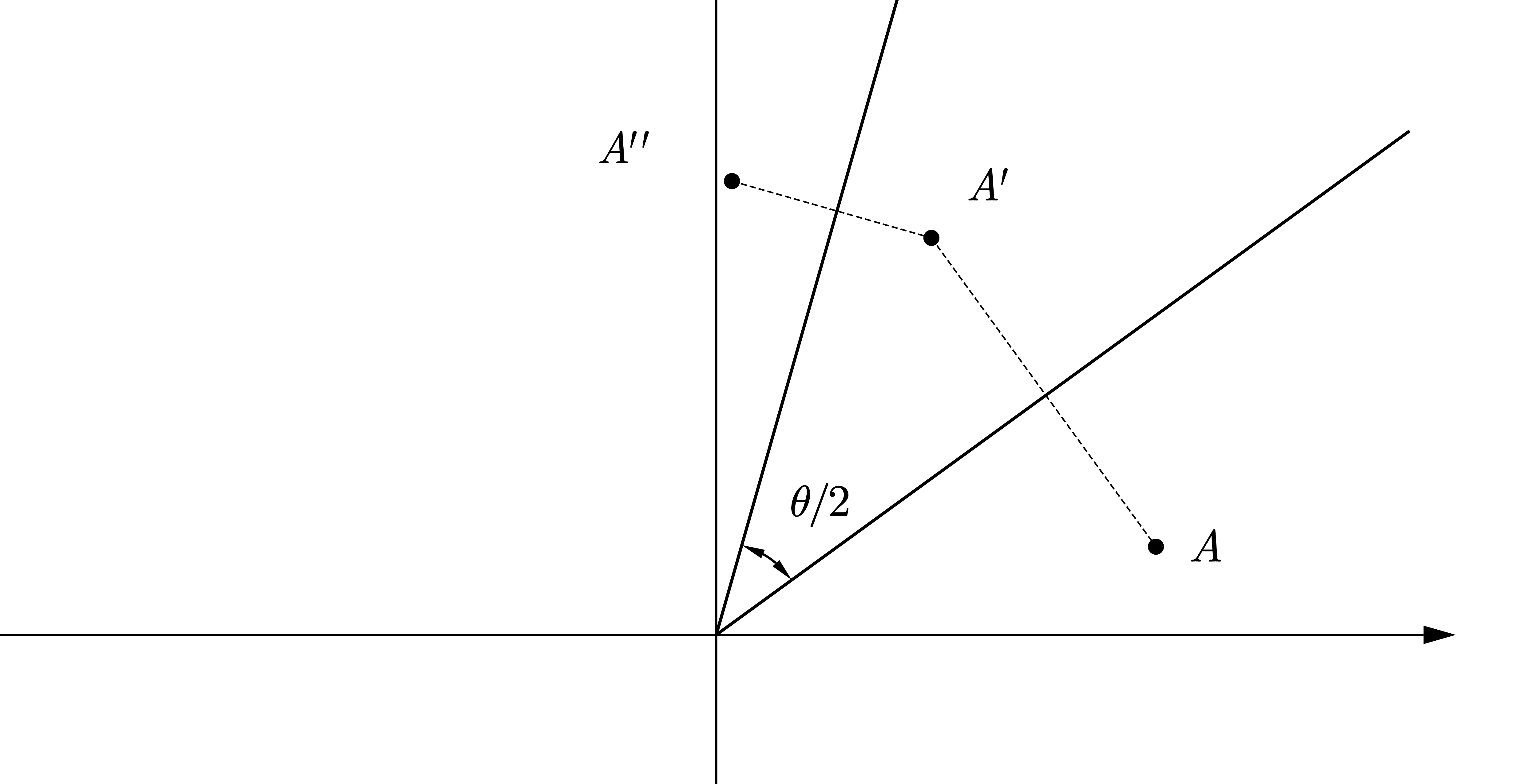
上图是反射导出折射的方法,对 ,如果想逆时针旋转 ,则考虑任意两个夹角为 的射线,然后分别沿着这两个射线进行反射即可.
正交投影
正交投影就是一个点往某个线上做垂线得到的投影,这种说法比较浅显,但是教材上花了很多的笔墨就是为了说明其在欧氏平面上的存在性.